Decoding gripping force based on local field potentials recorded from subthalamic nucleus in humans.
Here we show how the coordinated activity of nerve cells in a part of the human brain called the basal ganglia is important for controlling the force applied in voluntary movements. This information might help improve ‘brain-machine-interfaces’ that can be used to drive robotic and other devices to help people with movement difficulties.
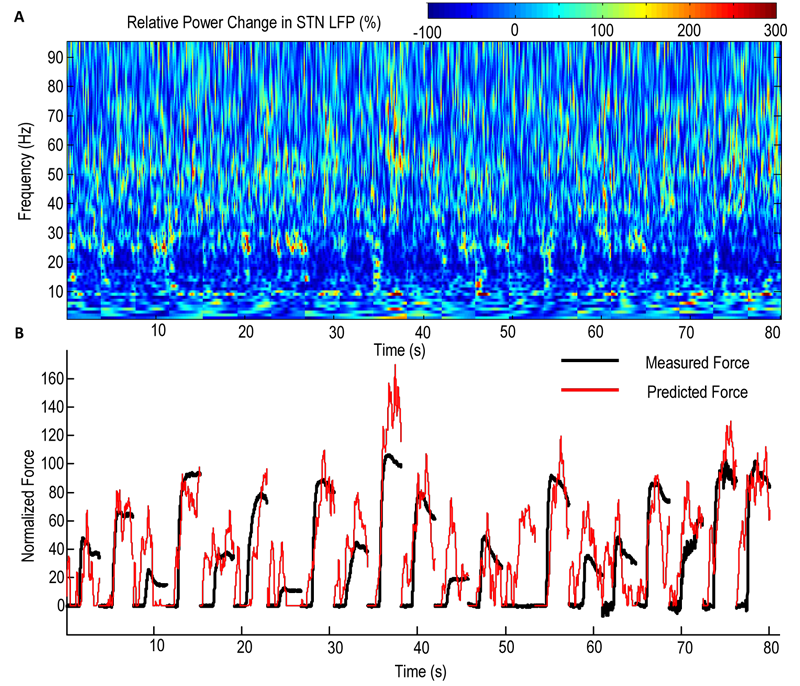
The basal ganglia are known to be involved in the planning, execution and control of gripping force and movement vigour. Here we aim to define the nature of the basal ganglia control signal for force and to decode gripping force based on local field potential (LFP) activities recorded from the subthalamic nucleus (STN) in patients with deep brain stimulation (DBS) electrodes. We found that STN LFP activities in the gamma (55-90 Hz) and beta (13-30m Hz) bands were most informative about gripping force, and that a first order dynamic linear model with these STN LFP features as inputs can be used to decode the temporal profile of gripping force. Our results enhance the understanding of how the basal ganglia control gripping force, and also suggest that deep brain LFPs could potentially be used to decode movement parameters related to force and movement vigour for the development of advanced human-machine interfaces.
2017.Int IEEE EMBS Conf Neural Eng, 2017():371-374.